简介
- EM Planner是Apollo面向L4的实时运动规划算法
- 该算法在Routing模块给出的参考线的Frenet坐标系下,进行车道级的路径和速度规划
- 主要通过Dynamic Programming和基于样条的Quadratic Programming实
- 论文地址
整体框架
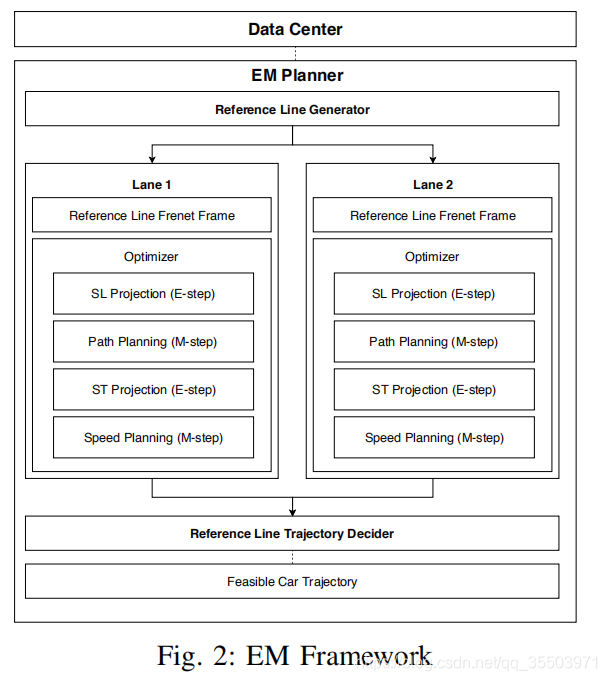
路径-速度迭代算法
- Frenet坐标下的轨迹规划实际上带约束的3D最优求解
- EM Planner迭代地进行路径和速度最优求解
- 是路径-速度解耦规划的一种
- 用上一帧的轨迹预测和周围障碍物的交互时间和位置
- 利用上面的交互时空的预测迭代生成一条新的path
决策和交通规则约束
- 交通规则直接影响决策模块
- 决策优先于规划,为规划带来更明确的意图,减少最优求解的搜索空间。
横向决策规划
-
SL投影
- 感知结果往往是UTM坐标系,为了方便处理,所有障碍物都从UTM投影到Frenet坐标系(x,y ->s,l)

-
安全走廊生成
- 根据障碍物的SL投影,一旦确定我们要从静态障碍物的左侧或右侧通过,就可以生成一条将障碍物排除在外的安全走廊
vector<tuple<s, right_l, left_l>> boundary;
- 根据障碍物的SL投影,一旦确定我们要从静态障碍物的左侧或右侧通过,就可以生成一条将障碍物排除在外的安全走廊
-
规划(QP优化)
-
约束
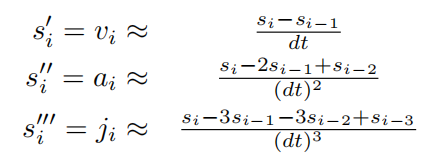
- 初始状态是ego当前在SL坐标系下的位置速度和加速度
- 边界约束和动力学可行性。这些约束都会施加在每个s处,通过限制l来将车辆限制在车道内。


-
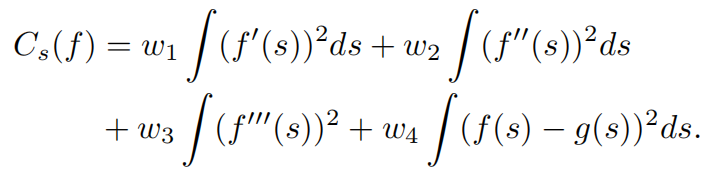
目标
- 其中$g(s)$为DP规划的路径,$f(s)$的一阶导表示朝向、二阶导表示曲率、三阶导表示曲率的导数。该函数描述了避让障碍物和曲线光滑性之间的权衡。
-
纵向决策规划
-
决策
- 将障碍物的预测轨迹投影到ST图上,与上面的SL投影类似
- 利用DP求解一条从(s=0,t=0)到(s = x,t=8)的最优speed profile(其实就是迪杰斯特拉算出来的最优path)
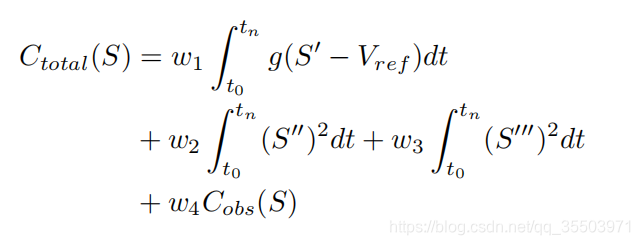
- 第一项是速度误差,g用来惩罚与$V_ref$的不同的误差。第二项、第三项用来描述曲线的光滑程度。最后一项用来描述障碍物代价,以到障碍物的距离来衡量。
-
规划
- 该speed file已经决定了对每个障碍物采取yeild或者overtake的决策,通过这些决策,可以生成ST图中的安全走廊
- 然后利用该安全走廊仿照path优化,求解一条精细的速度曲线